 GDU
GDU
 UUUFLY
UUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN QUILLE
QUILLE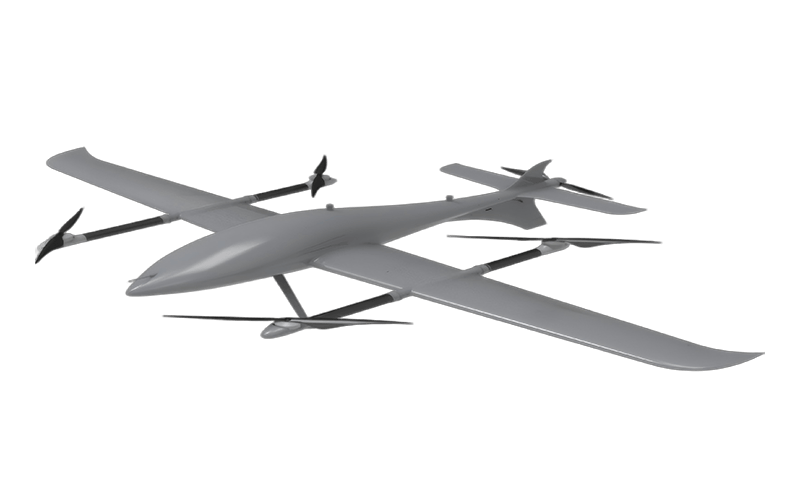 SKY NEXT
SKY NEXT- DJI Matrice-4T
- Drone DJI Matrice 4E
- DJI Matrice 4TD
- DJI Matrice 30T
- DJI Mavic 3 Enterprise
- Drone multispectral DJI Mavic 3M
- DJI RC 2 Plus Industry Plus
- Batterie DJI Matrice 4 Series
- Batteries de la série DJI Matrice 4D
- Batterie de vol intelligente TB65
- Batterie de vol intelligente TB100
- Batterie WB37
- Accessoires DJI

Dragonfish Standard : eVTOL multi-missions de nouvelle génération
Drone eVTOL multimission polyvalent Dragonfish Standard
Endurance équilibrée, flexibilité de charge utile et déploiement rapide pour les applications industrielles et de sécurité publique

Drone eVTOL multimission polyvalent Dragonfish Standard
Endurance équilibrée, flexibilité de charge utile et déploiement rapide pour les applications industrielles et de sécurité publique
Vol silencieux
Le Dragonfish atteint un vol ultra-silencieux grâce à son système de propulsion exceptionnel et à sa conception innovante de réduction du bruit. À peine audible au-dessus de 120 m AGL*, le DF réduit considérablement le risque de détection tout en garantissant la confidentialité des opérations.
En savoir plus >>

Vol silencieux
Le Dragonfish atteint un vol ultra-silencieux grâce à son système de propulsion exceptionnel et à sa conception innovante de réduction du bruit. À peine audible au-dessus de 120 m AGL*, le DF réduit considérablement le risque de détection tout en garantissant la confidentialité des opérations.
En savoir plus >>
Protection anti-interférences supérieure
Dans des environnements complexes, le drone maintient des performances exceptionnelles en matière de communication et de transmission vidéo, grâce à ses fortes capacités anti-interférences et à une transmission stable et fiable.

Protection anti-interférences supérieure
Dans des environnements complexes, le drone maintient des performances exceptionnelles en matière de communication et de transmission vidéo, grâce à ses fortes capacités anti-interférences et à une transmission stable et fiable.
Pourquoi les professionnels choisissent Dragonfish Standard ?

Protection contre les pertes GNSS
Lorsqu'il évolue dans des environnements non GNSS, le drone active la protection à l'atterrissage et descend automatiquement de sa position actuelle pour garantir la sécurité.
Retour à batterie faible
Les utilisateurs peuvent personnaliser le niveau de batterie attendu à l'atterrissage. Le drone calcule en temps réel le moment optimal de retour en fonction du niveau de batterie actuel et de l'état du vol, garantissant ainsi un atterrissage avec un niveau de batterie proche du seuil défini par l'utilisateur.
Retour du signal perdu
En cas d'interruption du signal entre le drone et la station au sol, la protection contre la perte de connexion s'active. Si des signaux GNSS sont disponibles, le drone entame un retour automatique à son point de départ.
Commande manuelle d'urgence

Redondances multiples, garantissant la sécurité de la mission
Auto-évaluation en un clic
Effectue automatiquement un contrôle du système avant le décollage, garantissant ainsi la sécurité et la fiabilité de chaque vol.
Retour à un bouton
Retour facile à l'écran d'accueil grâce au bouton Accueil. Rangement pratique : rangement rapide après le vol, facile à ranger et prêt pour la prochaine utilisation.
Suivi intelligent

Décollage et atterrissage de la plateforme mobile
Caractéristiques du Dragonfish Dragonfish Standard
| Spécification | Détails |
| Taper | Drone eVTOL multi-missions à rotors basculants |
| Dimensions | 1948 × 3295 × 520 mm (hélices comprises) |
| Poids | 7,5 kg (incluant 2 batteries et hélices ; hors charge utile du cardan) |
| Capacité de charge utile maximale | 1,5 kg |
| Durée de vol maximale | 126 minutes (avec une configuration de charge utile standard) |
| Vitesse horizontale maximale | 120 km/h |
| Vitesse horizontale maximale | 126 km/h (35 m/s) |
| Résistance maximale au vent | 15 m/s (mode voilure fixe), 12 m/s (mode vol vertical) |
| Plafond de service maximal | 5000 m au-dessus du niveau de la mer |
| Température de fonctionnement | -20°C à 50°C |
| Indice de protection IP | IP43 |
| Assistance GNSS | GPS + GLONASS + BeiDou + Galileo (positionnement multi-constellation) |
| Portée maximale de transmission du signal | 30 km |
| Temps de déploiement | ≤5 minutes (assemblage rapide sans outil) |
Comparaison des tailles

Accessoires

Station terrestre Dragonfish

Transmission d'antenne intelligente Autel (ASAT) (en option)

Nid de poisson-dragon Autel (facultatif)

Répéteur Dragonfish (en option)
Produit d'adaptation

Lutte contre la contrebande côtière

Application de la loi par la police

Prévention des feux de forêt

Inspection des lignes électriques

Inspection de la circulation




